Die Legosortiermaschine, abgekürzt LSM, wurde von Janek Giesler und Sullivan Hodzinski entworfen. Sie soll das Aufräumen nach dem Spielen erleichtern, indem sie die Farbe des Legosteins erkennt und an der richtigen Position aussortiert. Es gibt jetzt (Stand November 2022) Zwei Versionen.
Version 1
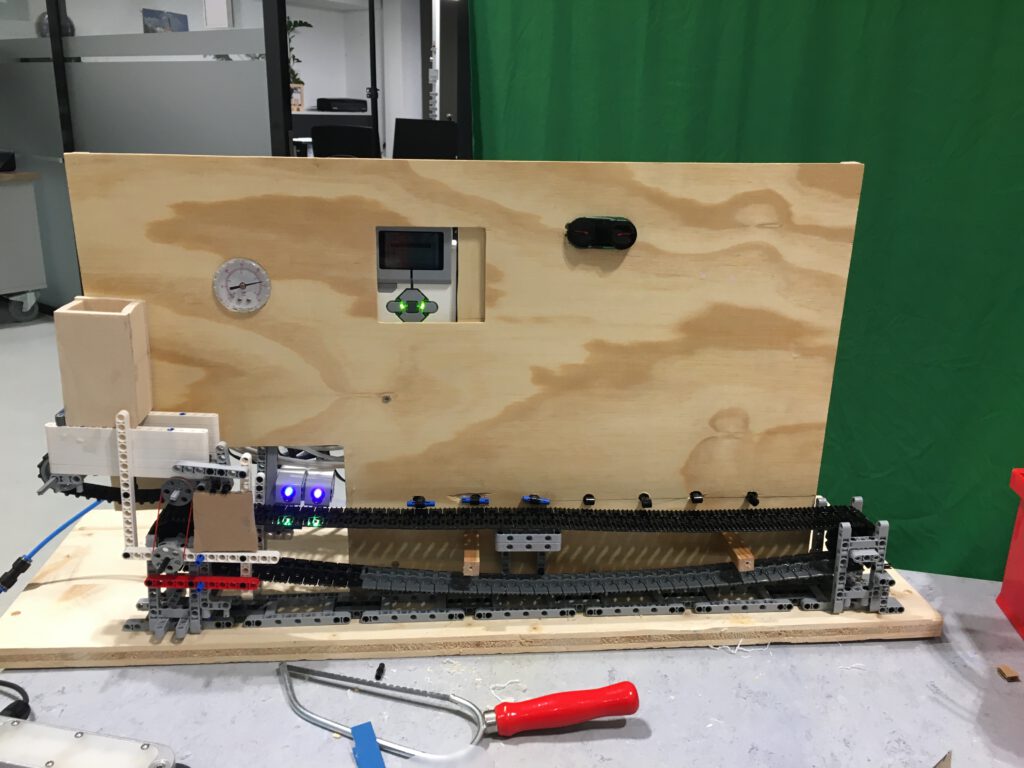
Die Legosortiermaschine 1.0 arbeitet mit zwei Legomindstorms, zwei “Klötze”, die mit Sensoren und Aktoren ausgestattet einen Code ausführen. An sie sind zwei Legomindstormfarbsensoren (einen für jeden Mindstorm) und insgesamt acht Motoren ausgestattet. Wir mussten zwei Mindstorms verwenden, weil ein Mindstorm nur vier Motoranschlüsse hat, wir aber acht brauchen. An der Seite der Legosortiermaschine sind zwei Ventile angebracht. Das eine Ventil ist für die Druckluft Zufuhr, und das andere für die Druckluft des selbst “gebastelten” Drucksensors. Der Drucksensor nimmt Farbsensoren erkennen die Farbe des Legosteines. Intern im Code wird dann ein Timer gestartet. Nach Ablauf des Timers wird davon ausgegangen, dass der Legostein sich an der richtigen Position befindet und der dafür eingerichtet Motor wird gedreht. Er legt ein Ventil um, dass einen Kolben nach vorne drückt, der ausfährt und dann den Legostein in den passenden Behälter schubst. Danach fährt der Kolben wieder ein, damit er wieder ausfahren kann oder einen anderen Legostein vorbeilassen kann.
Version 2
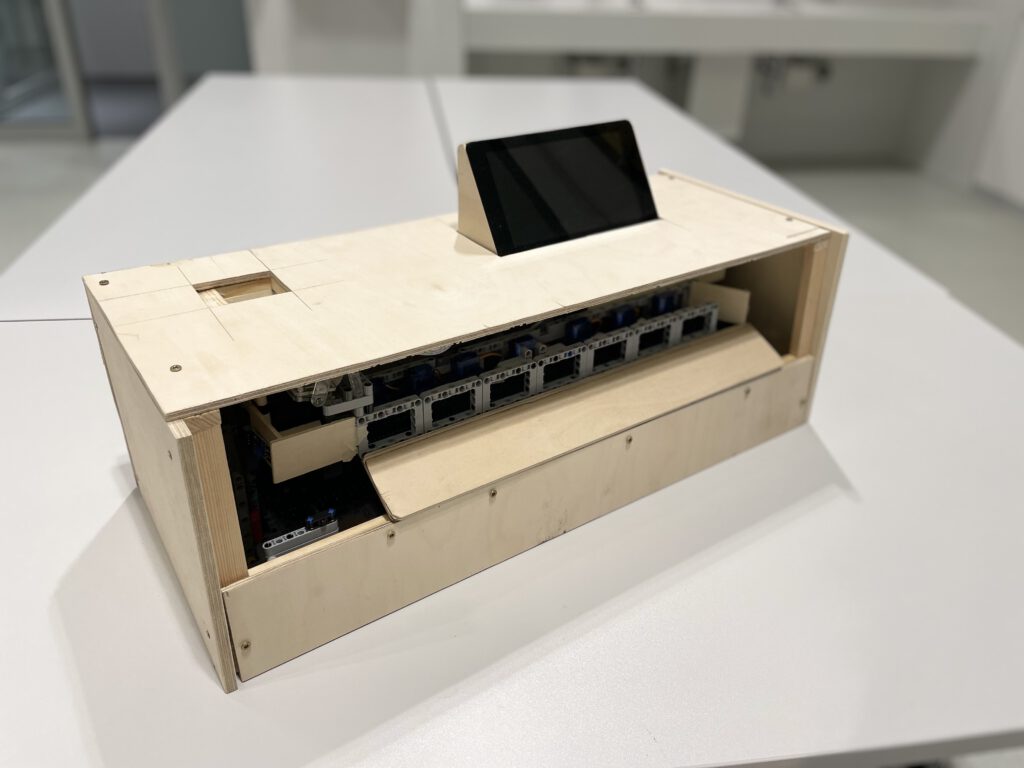
Die Legosortiermaschine 2.0 wird von einer Raspberry Pi und einem Arduino gesteuert. Es gibt einen Infrarotsensor, der erkennt, ob eine Legostein unter der Kamera liegt. Dei Raspberry Pi nimmt ein Bild mit der Kamera auf und erkennt die Farbe des Legosteines. Die Farbe wird durch eine Serielle Verbindung an den Arduino gesendet. Der Arduino lässt das Fließband weiterlaufen und steuert einen Servomotor an, der den Legostein aussortiert.
Wir machen das Projekt in der Wissens Werkstatt Friedrichshafen, ohne die wir das alles nicht geschafft hätten: